






一直以来,是否采用激光雷达都是区分自动驾驶技术派系的「三八线」,相比 Waymo、Cruise 等中规中矩采用激光雷达方案的传统派,马斯克一直秉持着 AI 视觉方案+毫米波雷达取代激光雷达的思路。
这背后的核心原因在于激光雷达有两大致命短板:
一是目前成本十分昂贵。
二是在雨雪雾等极端天气下精度会下降的很厉害。
一般来说,一台自动驾驶汽车不只需要一台激光雷达,才能导航并避开包括行人在内的障碍物,之类传感器不仅块头大立在车顶影响美观,而且目前价格也处在 8,000 至 30,000 美元左右。
年初 CES 期间,大疆所收购的 Livox 公司一举推出 599 美元起步的激光雷达产品线,让市场颇为激动。说到底,还是激光雷达太贵了!
近日,学术界传来好消息,来自斯坦福大学工程学院的教授 Jelena Vuckovic 及其团队提出了一种新方法——将车顶那颗难看又显眼的「烟囱」缩小到单颗硅芯片上,并且以数百美元的价格批量生产。
如果这项成果被证明在商业上可行,那么它将有助于开创自动驾驶汽车的新时代。
斯坦福大学工程学院教授 Jelena Vuckovic
Jelena Vuckovic 及其团队的研究成果已经发表于三月份《Nature》的子刊《Nature Photonics(自然 光子学)》,论文题为《Inverse-designed non-reciprocal pulse router for chip-based LiDAR》(逆向设计的片上激光雷达非互易性脉冲路由器)。
所谓激光雷达,实际上是「光检测和测距」的简写,在概念上与雷达相同,只是它使用光代替无线电波来「看到」人眼不可见的事物,根据光脉冲向前发送和光束反射回探测器之间的延迟来测量汽车和物体之间的距离。
与雷达单元相比,激光雷达单元在检测人和狗等生物方面做得更好,但是雷达在穿透雾,烟雾,雨水和其他大气异常方面表现更好。

Vuckovic 教授的研究突破在于:研究人员使用一种称为逆向设计的过程,创建了一种强大的算法,该算法可以沿一个方向向外发送一束红外光,并测量反射回来需要多长时间。这些信息有助于揭示光束路径中的物体。(补充背景:由于硅对红外线是透明的,就像玻璃对可见光是透明的一样。)
换句话说,算法为实际的光子电路绘制蓝图,光子电路执行特定的功能,将激光束发射到汽车前方,以定位道路上的物体,并将反射光反射回探测器。
研究表明,这种以硅为基础的芯片级非互易器件的发展,可能会为光通信和激光雷达(光探测和测距)的应用带来新的非线性器件和系统。
研究团队认为基于χ(3)的互易性器件从根本上受到时间反转对称性和热力学因素的限制,但它们的无源、无偏压,简单的体系结构使其特别适合集成光子学,这对芯片级激光雷达具有特殊的意义。
更小的激光雷达器件如何实现?
这项研究主要基于硅基光电子技术,在上个世纪 80 年代被提出了,并取得了一些成果。但是由于硅的特性,使得硅基有源器件一直无法发展。直到 2004 年 Intel 公司在《nature》上发表硅基 MOS 结构的调制器,真正商业化的硅光技术才开始发展,到目前,硅光技术也得到了迅速的发展。
Vuckovic 教授团队的论文提到,诸如隔离器和循环器之类的非互易性器件是微波和光频通信系统的关键启用技术,将非互易性器件小型化并提高其性能,能够使其在光学通信、信号处理、光谱学和传感领域的广泛应用成为可能。
尽管基于电磁效应的非互易性器件可用于自由空间和光纤通信系统,但它们的片上集成仍然具有挑战性,主要是由于伴随着高插入损耗、弱磁光效应和材料不兼容的缘故。
而新的研究表明,χ(3)非线性器件消除了这种需求,可以在单片集成平台中实现无源、低损耗、无偏置的非互易传输,适用于芯片级激光雷达的应用。
研究团队在研究χ(3)非线性器件的同时,还利用逆设计研究了级联 Fano Lorentzian 谐振器系统,在保持高传输率的同时增加非互易强度范围。
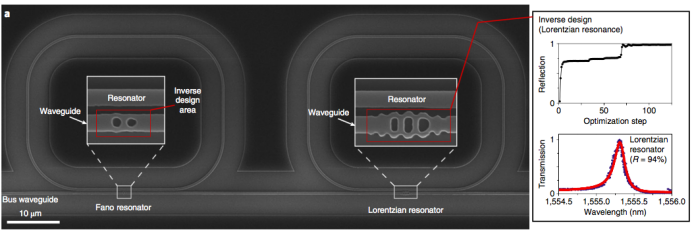
在绝缘体硅平台上实现的级联 Fano-Lorentzian 谐振器的 SEM 图像
目前,绝大多数非线性非互易超表面都基于 Fano 谐振原理,依赖于电磁波与超表面非对称结构的谐振作用,原理简单、实现成本较低。
研究团队设置了两端口 Fano 谐振装置,在谐振器耦合区域的波导中设计了一个部分传输元件(PTE),以在响应函数中创建 Fano 线形。
虽然 PTE 的寄生损耗、固有的腔损耗会严重降低,但是反向设计使他们能够通过 PTE 减轻额外的腔损耗,同时并行管理腔-波导的耦合强度。最后证明,Fano 谐振器所具有的尖锐的线形以及较低的固有损耗仍可以在中等功率水平上提供非互易性传输。
基于级联的非线性谐振,可在较宽的功率范围内工作。与在任何输入功率下工作的线性互易性器件不同,基于单个谐振器的非线性无源器件只能在有限的信号功率(NRIR)范围内导致不可逆传输,而两个谐振器级联器件可以设计成打破 NRIR 内任何功率值的单谐振器界限。
距离测量稳定性如何保证?
除此外,研究团队还演示了非互易基于传输和全光路由的光学测距测量,以确保测量的稳定性。
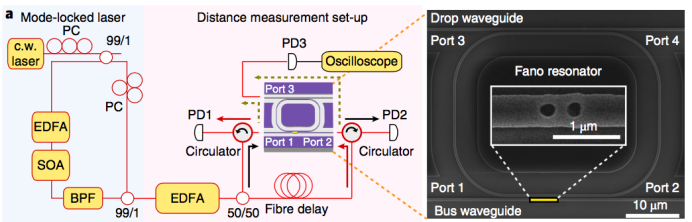
用于光学测距的实验原理图
为了产生锁模脉冲,研究团队使用光纤环形谐振器,该谐振器由光纤放大器、半导体光放大器、偏振控制器和带通滤波器组成。
锁模是光学里一种用于产生极短时间激光脉冲的技术,脉冲的长度通常在皮秒甚至飞秒。5 MHz 的脉冲重复频率允许测量距离长达 60 m,并且可以使用带通滤波器将脉冲的中心频率调整为 Fano 器件的工作范围。
生成的脉冲流由基于光纤的耦合器分流,一部分脉冲流直接发送到设备端口 1。另一部分脉冲流首先通过光纤延迟线,然后发送到端口 2。鉴于 Fano 谐振器所起的作用,耦合到端口 2 的脉冲流不会传播到端口 1。
而来自端口 1 的脉冲流传输到设备的端口 2。该设备将脉冲流从端口 2 到与 Fano 谐振器耦合的另一个波导中的端口 3。在此处与来自端口 1 的输入脉冲流结合以生成双脉冲流的电信号迹线。
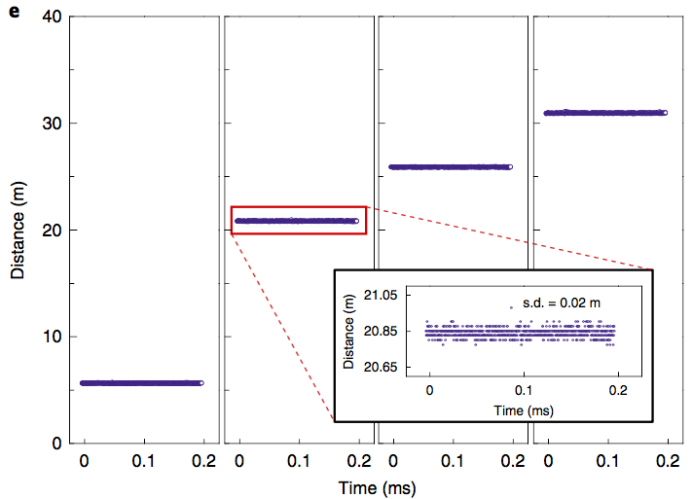
距离与时间的关系图,其中时间增量是参考脉冲周期,显示距离测量的稳定性
研究通过测量距离迹线的放大视图,证明了这种光学距离测量的稳定性。
研究表明,Fano 非互易发射器-路由器设备可以保护脉冲激光源免受反射脉冲流的影响,从而使系统稳定运行,同时将来自这些反射脉冲的光路由到另一个波导。如果另一个 Fano 谐振器串联连接,且延时对应于脉冲宽度的一半,则即使在同时激发的情况下,反射脉冲也可以被隔离。
基于这些发现,研究团队的实验证明已实现的无源非对等发射机和路由器,在完全集成的芯片级激光雷达系统中作为基本组件的可行性。
激光雷达能否大规模运用在无人驾驶汽车
当然,在芯片上建立这种测距机制,只是制造廉价激光雷达的第一步。研究人员表示,目前正在研究下一个里程碑,确保激光束可以旋转而不使用昂贵的机械部件。
该研究的下一步是研制「单芯片激光雷达」,以扩大其覆盖范围,直到包括完整的 360 度圆角,而无需使用机械零件。
Vuckovic 预计,她的实验室离建造一个供道路测试使用的原型机还有大约三年的时间。「我们正朝着制造一个激光雷达芯片的方向发展,这种芯片的价格非常便宜,足以帮助为自动汽车创造大众市场。」
迄今为止,马斯克拒绝使用激光雷达,他说,一套摄像头和雷达传感器可以在没有激光雷达限制的情况下做得更好。如果激光雷达的成本大幅下降,他可能会改变自己的曲调。对于完整的自我驾驶,似乎更多的信息总应该比少好。
本文来自微信公众号“机器之能”(ID:almosthuman2017),作者:力琴、吴昕,36氪经授权发布。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

