





芬兰VTT技术研究中心对它们名为Marilyn的机器人 自动驾驶 汽车进行了升级,使Marilyn在雾和雪天的条件下获得比人类更好的视觉能力,从而继续稳定巡航避免被迫停车。

VTT称,通过利用车顶安装的超越人眼感知波长的LiDAR(激光雷达)传感器,自动驾驶 汽车能够分辨雾、雪中走过的行人,自动避免事故的发生。这为 自动驾驶 汽车在恶劣天气中的安全巡航成功的迈出了一大步。
据麦姆斯咨询报道,VTT为其机器人自动驾驶汽车加装了1550 nm波长LiDAR光学元件以及智能软件,大幅改善了传感器性能。附加的软件模块能够过滤LiDAR探测的点云数据,评估扫描可靠性,以确保车辆能够在雪、雾天气中的正常运行,在这些环境下,LiDAR传感器能够“看”到可见光和近红外光谱范围。
“尽管Marilyn在浓雾中的视野还仅有30m,但新型LiDAR可帮助车辆在恶劣的天气下慢速行驶,避免被迫完全停车,”VTT机器人自动驾驶汽车研究组项目经理Matti Kutila说,“在Marilyn装配的众多传感器中,905 nm LiDAR传感器无法在浓雾中有效工作,新款1550 nm LiDAR是唯一能在浓雾中帮助车辆做出正确转向操作的传感器。”

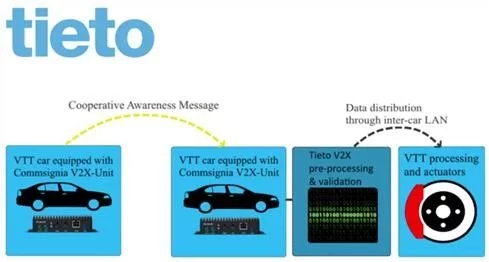
VTT自动驾驶汽车装配的协同感知车联网V2X单元,可以向周围车辆发送当前车辆的速度、位置等信息
VTT称,Marilyn结合了雷达和LiDAR两种技术,并分别利用了它们各自的优势,使Marilyn能够比人类驾驶员更安全的巡航。
不过,VTT坦言,自动驾驶汽车要安全的运送人员,还有很长的路要走,但是新型传感器的装配和探测性能的改善,又向目标迈进了一大步。
Marilyn将在近期于德国乌尔姆举办的RobustSENSE上进行展示,同期一起参展的还有来自University of Ulm(乌尔姆大学)、Daimler(戴姆勒集团)、FZI、Fiat(菲亚特)、Ficosa以及Fraunhofer(弗劳恩霍夫)的机器人自动驾驶汽车。VTT称,这是欧洲首次有6台机器人自动驾驶汽车在同一个有行人往来的园区内,根据不同的场景同时运行。这些自动驾驶汽车将挑战交叉路口、规划路线,以及手动和自动模式的切换。
下一阶段,VTT将测试Marilyn在没有研究人员帮助情况下的自动泊车能力。
如果本网所选内容的文章作者及编辑认为其作品不宜公开自由传播,或不应无偿使用,请及时通过电子邮件或电话通知我们,以迅速采取适当措施,避免给双方造成不必要的经济损失转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

