




近日,美国当地政府关于特斯拉的一份报告出炉了,报告的内容是对去年一名男子驾驶特斯拉丧生的调查。
虽然这份报告的结果显示,这名男子违规操作,在长达37分钟的时间内,只有25秒钟把手放在方向盘上的,其间被系统警告了7次之多。
但我们仍然失望,自动驾驶的时代,到底什么时候才能真正到来呢?
要回答这个问题,我们绕不开的一个技术是:激光雷达。这是自动驾驶技术中,精准度最高的技术,可特斯拉偏偏不用它。
为什么特斯拉不买账?
激光雷达到底有哪些痛点没有攻克?这到底是一种怎样的技术?它现在的发展状况又如何?
不着急!在我们开始这篇知识装逼扫盲贴之前,先来观瞻一下当下的自动驾驶核心技术的格局:
如今的天下,主要分为两大技术门派:
超能力


声呐

雷达
 雷达(radar: radio direction and ranging),与声呐类似,也是一场臭名昭著的世界大战(第二次世界大战)的产物。雷达利用无线电波测距,而非声波或光束。我们在Homer上部署了大量雷达(Delphi传感器),测试验证,它可以精确检测并追踪200m范围的物体。
雷达(radar: radio direction and ranging),与声呐类似,也是一场臭名昭著的世界大战(第二次世界大战)的产物。雷达利用无线电波测距,而非声波或光束。我们在Homer上部署了大量雷达(Delphi传感器),测试验证,它可以精确检测并追踪200m范围的物体。
激光雷达
激光雷达用于自动驾驶
摄像头所驱动的自动驾驶
激光雷达的未来
虽然这份报告的结果显示,这名男子违规操作,在长达37分钟的时间内,只有25秒钟把手放在方向盘上的,其间被系统警告了7次之多。
但我们仍然失望,自动驾驶的时代,到底什么时候才能真正到来呢?
要回答这个问题,我们绕不开的一个技术是:激光雷达。这是自动驾驶技术中,精准度最高的技术,可特斯拉偏偏不用它。
为什么特斯拉不买账?
激光雷达到底有哪些痛点没有攻克?这到底是一种怎样的技术?它现在的发展状况又如何?
不着急!在我们开始这篇知识装逼扫盲贴之前,先来观瞻一下当下的自动驾驶核心技术的格局:
如今的天下,主要分为两大技术门派:
"谷歌派"和“特斯拉派”
其中,“谷歌派”包括:谷歌、百度、Uber、丰田、福特等几乎所有的主流车厂,而“特斯拉派”包括:不好意思只有特斯拉一家(小团队还是有一些的)。因此被划分为两派,其最大的技术分歧就在于——激光雷达到底是否不可替代。
在谷歌派看来,激光雷达必然是未来趋势,而特斯拉掌门马斯克却偏偏不理睬。
对此,马斯克主要的理由是:激光雷达不是必须的。
特斯拉在自动驾驶布局上,采用了毫米波雷达+超声波雷达+摄像头的组合,之所以不采用激光雷达的解决方案,恰恰是因为激光雷达成本高昂,不利于大规模市场化。
的确,价格高昂这是激光雷达最大的致命点。
谷歌早期购置一台64线激光雷达,单价能达到73000美元,这都直逼汽车本身的价格了好吗?
除此以外,体积大也是激光雷达的一大问题。
喏,谷歌的无人小车上那个又大又难看的帽子就是咯。
再一个问题就是,产能低。
汽车厂商要拿到一台全新的激光雷达产品,至少要等6个月...
价格高、体积大、产能低,这三点强烈制约着激光雷达的商业化。
那么问题来了,既然这么麻烦,为啥除了特斯拉,所有的互联网公司,车厂都为激光雷达站台呢?
不为别的,就因为激光雷达精准啊,上路开车,这玩意可不是开玩笑的。
你看特斯拉辅助驾驶所出的车祸,真叫人一个胆战心惊啊。
OK,到这里,就让我们开启一场激光雷达之旅吧。
本文接下来的内容将详解激光雷达,并溯源它的自动驾驶历程,以及它同其他相关传感器的长短之争。另外,还有各色炫图伺候,Enjoy!
超能力
当自动驾驶汽车(或任意一种机器人)装备激光雷达后,它们在感知世界上将具备一些“超能力”:
·持续360度可视——任何时候可以看见任何方向的世界;
·超高精度测距——总是能知道周围物体距离你的精确距离(测距误差正负2cm)。
如果你以前见过自动驾驶汽车,那你很可能看到过激光雷达,它们正是那个安装在车顶上不断旋转的大盒子,如下图所示安装在UBER和百度的自动驾驶汽车上。
市场上最流行的激光雷达之一,是高功率的Velodyne HDL-64E,比如安装在Homer车顶的这部(下图):
激光雷达工作原理
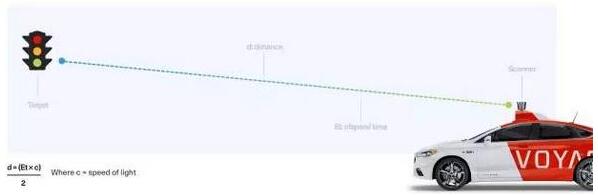
一个传感器如何能具备360度视野,同时还能精确测距?简单来说,激光雷达不断发射激光束,然后通过测量激光返回传感器的时间来感知世界。
激光雷达一秒可发射数百万束激光,所获得的测量足以构建出一个真实的视觉化3D世界。这意味着,你可以推断出周围(最大距离60m,不同的传感器参数可能不同)任何物体的精确位置。
激光雷达历史
为了理解人们采用激光雷达来实现自动驾驶的原因,我们需要了解一下与激光雷达相似的其他技术。
声呐
最原始的距离感知机器是蝙蝠(5千万年历史)。蝙蝠(或海豚,等)利用回声定位实现与激光雷达相同的距离检测能力。回声定位,又称声呐(sonar: sound navigation and ranging),是利用声波来进行测距,而非如激光雷达所用的光波。
蝙蝠诞生5千万年后,第一次世界大战的爆发促成了人造声呐传感器的首次部署,以增强潜艇的水下作战能力。由于声音在水中的可传输距离比可见光或无线电远得多,声呐在海战中有着得天独厚的优势。而今,声呐也被广泛用于汽车,主要用作停车传感器。停车雷达只需知道墙面距离汽车多远,是一种短距离(约5m)效果很好且成本低廉的传感器。但是,声呐并未被证明可用于自动驾驶汽车所需要的各种距离(60m+)。
雷达
雷达几乎没有缺点。极端天气也不会影响它的效果,且造价极其低廉。雷达不仅被广泛用于目标检测,还可被用于物体追踪(举例来说:监测一辆车的行进速度和方向)。雷达没有激光雷达那样的高分辨率,但是两者非常互补,不会冲突。
激光雷达
激光雷达诞生于1960年代,紧随激光时代而来。1971年,阿波罗15号执行任务时,宇航员利用激光雷达技术绘制月球表面地图,向公众首次展示激光雷达技术的实用价值。
该技术在用于自动驾驶领域之前,激光雷达主要应用在考古学领域。在大面积土地测绘方面,激光雷达发挥了巨大的作用,农业和考古学都极大地受益于此。
BBC用一篇题为“ 激光雷达为一片不为人知的地域带来光明”的报道,特别详尽地介绍过它在考古学中的巨大应用价值。
直到2000年以后,激光雷达才首次被用于汽车。在2005年的DARPA自动驾驶挑战赛中,Stanley(以及后来的Junior)首次成功完成挑战,让激光雷达一战成名。
Stanley是2005年DARPA自动驾驶挑战赛的冠军,其车顶上安装了5部SICK 激光雷达,并且配备了一部军用级GPS,以及陀螺仪、加速计与一个观测距离达80m+的前置摄像头。这些传感器由一台拥有6个1.6Ghz奔腾处理器的Linux电脑控制。
使用SICK激光雷达(2005年挑战赛的许多车辆均有使用)最根本的挑战,是在于每束激光只能扫描到整个空间某一切面上的观测结果,因此必须仔细调整激光指向。许多队伍将其放置在一个倾斜台子上,使其扫描到一定程度的空间结果。简要说来,SICK是一个2D激光雷达(一个方向发射少量光束),现代激光雷达是3D的(所有方向发射大量光束)。
Velodyne时代
提到激光雷达,不得不提这么一家公司——Velodyne。
长期以来,Velodyne都是激光雷达行业领头者,不过,人起家可不是靠这个。
在1983年,Velodyne是一家专注于低频音波以及重低音音箱技术的音响公司。重低音音箱会包含传感器、DSP和DSP控制算法等部件。
就在Stanley出现的那个时候,Velodyne转变为了激光雷达公司。
在2004年首次DARPA挑战赛上,Velodyne创始人David和Bruce Hall以队伍DAD(Digital Audio Drive)参赛。在2005年的第二次DARPA比赛中,David Hall发明了三维的基于激光扫描的实时系统并申请专利,奠定了其今日激光雷达产品的基础。
在2007年的第三届DARPA比赛中,大部分队伍便已经使用了此项三维的激光技术作为其感知系统的基础。
现在,David Hall的这项发明作为驱动自动驾驶技术发展的关键技术突破陈列在美国国立博物馆。
Velodyne的首款激光雷达扫描器直径约30英尺,重约100磅。通过将激光雷达技术商用而非只用于比赛,激光雷达的尺寸和重量被大幅降低,并且性能也得到提升。
在2007年的DARPA城市比赛中,Velodyne的HDL-64E激光雷达成为地形图构建和障碍检测的关键方法,被众多top队伍使用,其中6个完成比赛的队伍中有5个使用了此传感器,包括冠军和亚军队伍。有些队伍严重依赖于激光雷达对环境的探测信息,导航自动装置通过构建的复杂城市环境。(来自Wikipedia)
激光雷达用于自动驾驶
为什么将激光雷达用于自动驾驶?一句话:三维地图!
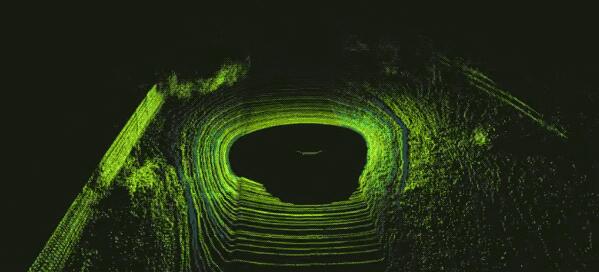
激光雷达可以得到物体的高精度的空间三维信息,相当于产生一幅巨大的三维地图(它的原始应用!),然后据此对其中的汽车或者机器人进行导航。当使用激光雷达进行感知和导航时,你可以提前知道一个湖的边界线,或者知道500m后会有一个停车标志或交通信号灯。这种预测技术正是自动驾驶汽车所需要的,其成功应用是过去五年来自动驾驶技术进步的重要原因。
目标检测
激光雷达的分辨率越来越高,探测距离越来越长,使得其开始被用于物体检测和跟踪。激光雷达不仅可以使你准确知道所处的三维位置和帮助导航,而且还可以检测和跟踪诸如汽车、行人,Waymo甚至还说可以追踪橄榄球头盔。
现代激光雷达系统能够区分行进的是行人还是自行车,甚至能够给出其行进的速度和方向。
以其出色的导航能力、预测能力,以及其高分辨的物体跟踪能力,激光雷达成为现代自动驾驶汽车的关键传感器,目前其统治地位还很难撼动。除非….
摄像头所驱动的自动驾驶
现在也有一些公司主张不使用激光雷达,完全通过摄像头(可能还有雷达)来实现自动驾驶。特斯拉就是其中之一,马斯克也极力推广该方案,认为人类可以通过眼睛、耳朵和大脑在世界中行走自如,为什么汽车就不可以呢?
我相信这一路径肯定也能得出一些激动人心的成果,特别是当Comma、AutoX这样的优秀团队纷纷向着这个目标努力时。
需要指出的是,特斯拉非常看重产能,他们希望一年能很快地产出50万辆车。因此,他们对激光雷达技术将来的成本下降不感兴趣,他们需要的是现成的低成本技术。
激光雷达的未来
激光雷达行业的发展主要关注:成本的降低,精度以及测距范围的提升。
成本降低
强大的激光雷达单元现在需要近80k美元,然而,固态激光雷达能把价格降到低于1000美元。LedderTech是此早期市场的领军者。
以下是Velodyne关于固态激光雷达的观点:
由于需要嵌入式传感器尺寸小且成本低,这推动了固定的固定传感器的研发,当然这样也意味着传感器的观测范围会变小。
Velodyne支持固定的和旋转的传感器。固定传感器可以作为嵌入式微型传感器。从成本角度分析,固定和旋转的激光雷达均包含透镜、激光和探测器。旋转式的传感器共用一套透镜、激光和探测器,而固定式的传感器需要多套透镜、激光和探测器。因此,旋转式的成本更低,且由于可以减少实时合并不同点的探测视图所带来的误差(当物体在高速行进时这一点非常重要)性能也非常强大。
精度和距离提高
激光雷达技术应用数量激增,这促使许多顶尖的个人和团队纷纷建立公司研发相关产品。更高的精度、更远的跟踪范围(某些场景可达200m)将得到更好的目标识别跟踪性能,这也是Luminar之类的创业公司之间最大的区分点。
写在结尾:
如今,激光雷达这只拦路虎正在快速迎来它的大好未来。
提提两个特大的利好消息。
一个来自谷歌,一个来自Velodyne。
在2017年1月的底特律车展上,谷歌旗下自动驾驶公司Waymo放出重磅消息:称其已将激光雷达的成本下降了90%以上。
而随后,激光雷达的祖师爷Velodyne也大秀肌肉,称2018年能生产高达100万枚激光雷达,并在未来使激光雷达的单价下降至50美元以下。
如此,激光雷达就要真正雄霸自动驾驶的天下了?
等它大规模商业化了,也许真正的自动驾驶的时代,就到来了。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

