




简介
步进电机、直流电机和无刷直流电机的主要区别在于它们的驱动方式。步进电机是以步阶方式分段移动,直流电机和无刷直流电机通常则采用连续移动的模拟控制方式。由于步进电机采用步阶移动,所以特别适合绝对寻址应用,目前市场上常见的步进电机已能提供每一步1.8°或0.9°的精确移动能力。步进电机采用直接控制方式,它的主要命令和控制变量都是步阶位置 (step position);相形之下,直流电机则是以电机电压做为控制变量,以位置或速度做为命令变量。直流电机需要反馈控制系统,它会以间接方式控制电机位置,步进电机系统多半则是以「开环」方式进行操作。
步进电机
步进电机可以根据电机结构、驱动架构和步进方式来分类。步进电机的结构有好几种,包括可变磁阻 (variable reluctance)、永磁和混合式永磁 (hybrid permanent magnet),永磁步进电机的成本很低,多半用于价格低廉的消费性产品。混合式步进电机的价格略高,是工业移动控制应用最常见的电机。可变磁阻电机通常有3或5个相位,需要采用不同的驱动电路架构。
单极性 (unipolar) 和双极性 (bipolar) 是步进电机最常采用的两种驱动架构。单极性驱动电路使用四颗晶体管来驱动步进电机的两组相位,电机结构则如图1所示包含两组带有中间抽头的线圈,整个电机共有六条线与外界连接。这类电机有时又称为四相电机,但这种称呼容易令人混淆又不正确,因为它其实只有两个相位,精确的说法应是双相位六线式步进电机。六线式步进电机虽又称为单极性步进电机,实际上却能同时使用单极性或双极性驱动电路。
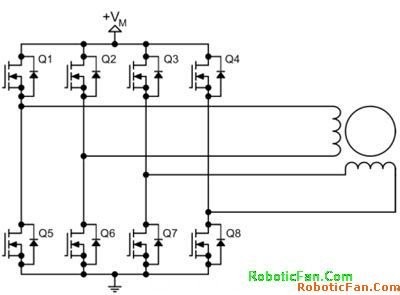
图1:单极性步进电机驱动电路
双极性步进电机的驱动电路则如图2所示,它会使用八颗晶体管来驱动两组相位。双极性驱动电路可以同时驱动四线式或六线式步进电机,虽然四线式电机只能使用双极性驱动电路,它却能大幅降低量产型应用的成本。双极性步进电机驱动电路的晶体管数目是单极性驱动电路的两倍,其中四颗下端晶体管通常是由微控制器直接驱动,上端晶体管则需要成本较高的上端驱动电路。双极性驱动电路的晶体管只需承受电机电压,所以它不像单极性驱动电路一样需要箝位电路。
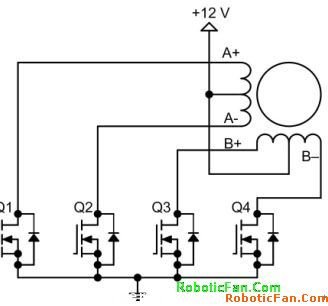
图2:双极性步进电机驱动电路
直流和无刷直流电机
直流电机是最常见和成本最低的小型电机,并且广泛用于各种应用。无刷直流电机宣称能提供更高可靠性以及更低噪声和成本,然而到目前为止,它却只能在磁盘或计算机风扇等少数量产应用中取代传统直流电机。在某些应用里,无刷直流电机有多项优点胜过传统电刷电机,例如它以电子组件和传感器取代电刷,不但延长电机寿命和减少维护成本,而且也没有电刷产生的噪音。直流电机的特性使它成为调速系统最容易使用的电机。直流电机的硬件电路架构如图3所示。
选择正确的电机控制组件
为电机控制等特定应用选择组件时,必须先了解这些组件的功能特色,然后在应用中充份发挥它们的各项优点。步进、直流和无刷直流电机通常是由提供有限控制功能的专用组件来控制,这些组件大都只有简单的微处理器界面,系统效能因此受到很大限制。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
































 关注我们
关注我们

