




无论是德国率先提出的“工业4.0”概念,美国推行的“先进制造伙伴关系”计划,还是日本正在实施的“智慧制造系统”和中国工信部通过的“中国制造2025规划”,这些都指向同一个目标,那就是希望通过先进的IT与自动化技术来促进制造业的革新,以实现“智能化”,提升效率,降低成本。而要实现这个目标工业机器人是不可或缺的一环。
基于Altera Cyclone V SoC的单芯片工业机器人系统架构
以前,工业机器人应用最为广泛的是汽车制造业;现在,工业机器人制造企业正努力向其他领域拓展。工业机器人制造企业也如雨后春笋般不断涌现,据统计仅去年中国国内差不多增加了200多加工业机器人制造厂商。对于工业机器人的市场前景,业界都是一致看好,普遍认为未来5~10年将会迎来工业机器人的一个爆发期。不过,要想在这一波浪潮中得益的话也并不容易。因为工业机器人涉及的系统相当复杂,仅核心零部件就包括了机械系统、控制器、伺服器和减速器等等。本刊就工业机器人的关键技术问题采访了一些半导体厂商,详细介绍了工业机器人当中的一些电子核心零部件。
控制器平台之争
在Altera公司亚太区工业业务部市场开发首席经理江允贵看来,有三个趋势在推动着工业自动化市场的蓬勃发展。
一是,提升能源效率,降低能源成本;
二是提升生产效率,这包括功能安全、生产线的稳定安全、保护操作人员的安全、以及机器损坏的降低和更长的生命周期和可靠度;
三是所谓的智能工厂。而只有前面两个因素达到后,才有可能实现智能工厂。他认为工业机器人是自动化里的很关键一部分。
江允贵拿智能工厂举例,他说现在一个典型的的智能工厂,从企业到工厂,以及工厂内如都是以工业以太网相连接的,他认为用工业以太网取代传统的以太网,主要是因为工业以太网的实时性更好。工业以太网可以连接主站和从站,连接主站中的PLC、PAC/运动控制器和HMI,和从站中的伺服器、I/O模块等等。
他进一步指出,其实工业机器人就是由这些关键零组件组合而成。由这些主站和从站可以组合成一个工业机器人,也可以做成一个CNC,CNC也是工厂自动化的一个关键。
虽然工业机器人可以看成是由上面的零组件组合而成,但具体到工业机器人里面的话也会有所不同。工业机器人的主要结构有机器人的控制器和伺服器。目前来说工业机器人有两轴、3轴的、最高也有7轴的。不过常用的是3~6轴的SCARA或Delta机械手臂。
由于中国是生产制造大国,由于缺工,智能手机和汽车制造商的需求,工业机器人市场增长非常迅速。江允贵表示,对于工业机器人的主控平台来说,一般都是以基于PC的X86的工控机为主,特别是在欧美工业机器人市场。一般在这样的X86平台上,FPGA是作为辅助存在的,主要充当加速的功能。在一个X86工控机主控平台上经常会出现多张PCI-E或PCI卡来实现多轴控制功能。不过这样的主控平台一般用于比较高端的工业机器人当中,因为它性能高,成本也高。
还有一种主控平台是用多核心的高端DSP为核心设计的,不过不是很常见的。
另外还有嵌入式主控平台。江允贵表示,目前Altera正在关注这部分的市场。他们希望可以使用单芯片就能实现工业机器人的控制,而不需要昂贵的X86平台再加上FPGA来做机器人的控制。
工业机器人的种类比较多,其最主要的功能有焊接、搬运、摆放、切割和喷漆等等。按照应用场景的不同,机器人的设计要求也会不一样,比如有的需要高速手臂、有的需要慢速、有的需要扭力大、有的需要很高的精密度等等不一而足。
“近期Altera就利用单颗SoC芯片制作出了一个快速、摆放型工业机器人参考设计方案。”江允贵这样对本刊记者表示。该工业机器人的主站控制平台由基于Cyclone V SoC的开发板实现。可以应用在生产线上,包括螺丝的摆放,饮食业中食品(方便面,糖果等)的摆放。对摆放型工业机器人来说,速度和精确度是最重要的参考指标,因为只有这样才能提高生产效率。“为达到高速和高精确度的指标,我们在这个参考设计中采用了目前最受欢迎的EtherCAT工业以太网。EtherCAT属于以太网,但经过我们改良物理层后,可以达到更好的实时性。”江允贵表示。
为了证明这个工业机器人的性能,他通过视频展示了该摆放型工业机器人在下跳棋、巡边和画圆周等运动方式。他认为这三个运动方式可以很明显地看出机器人的效能。

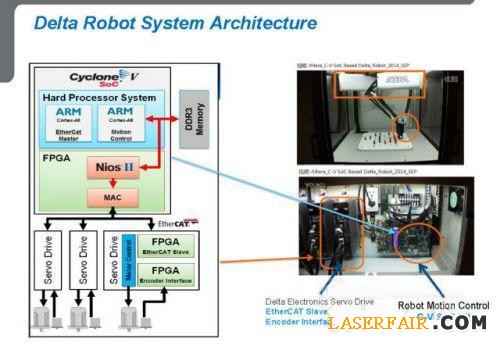
基于Altera Cyclone V SoC的单芯片工业机器人系统架构
目前市场上还比较少见使用单芯片来实现工业机器人的主站控制。从图2中的系统架构图中可以看到,在主芯片的Cyclone V SoC中,双核Cortex A9 ARM有一个核用作运动控制,另一个核用来做EtherCAT主站。双核各自负责自己的功能,运动控制功能主要负责机器人3只手臂的协调工作,算法都放在ARM中。FPGA主要用来做Nios软核功能。通过FPGA中的MAC出去以后,连接了3个伺服驱动器。据江允贵透露,参考设计中的伺服驱动来自台达。每个伺服驱动里面都有一个FPGA用来做EtherCAT接口。目前伺服驱动里的算法还是通过DSP来实现的。
“当然,我们并不做机器人的开发,只是提供一个参考设计,证明单芯片也是可以实现机器人主站控制的。”江允贵这样表示,“我们可以把我们的经验分享给机器人制造商,帮助他们快速制造出产品来。”
不过他也坦承这种单芯片方案对欧美机器人厂商并没有太大的吸引力,他们更愿意使用X86平台。反而是亚太区的机器人厂商更愿意接受。因为单芯片方案不仅可以帮助降低成本,也可以让他们生产差异化的产品,以避免与欧美机器人厂商直接竞争。
伺服器解析
若要工业机器人的性能满足需求,除了要有好的主控平台外,还需要非常好的伺服器和精密算法。伺服器包括有传感器、伺服电机、电机驱动和处理器等等。精密算法与传感、驱动和处理息息相关。
目前机器和自然的交互还是一个难度很大的课题,机器人的视觉、感觉等都十分有限,精准的动作控制也会受到诸多限制。为了应对上述问题,使机器人更加贴近人类的第一步就是添加更多的传感器。德州仪器中国区市场开发高性能模拟产品业务拓展经理信本伟觉得可以给机器人加入环境光传感器。他指出德州仪器的ALS OPT3001可以匹配人类眼睛所接收的光谱,“见我所见”。另外LDC1000传感器能够以“亚微米”的精度感知位移,并像任何精确闭环控制一样向控制系统进行反馈,使用该传感器可以让机器人的动作更加流畅,自然。
信本伟进一步指出,在驱动方面,德州仪器也可以提供很多专业且先进的外围设备,比如高分辨率和可配置的PWM、DAC界面连接和保护等等。当然还有健全的防护式电机驱动解决方案。“德州仪器的电机驱动解决方案同时结合了过电流与短路保护、热保护、低电压锁定和击穿保护等等。并通过了ISO61580工业功能安全标准的认证。”他对本刊记者表示。
除了信本伟之外,德州仪器中国区嵌入式产品业务拓展总监吴健鸿对德州仪器在DSP电机控制方面的优势也充满自信,他说,在电机控制领域,德州仪器积累了二十多年的经验,有比较多的成熟可靠的产品。就在过去两年内,德州仪器就推出了基于C2000的InstaSPIN FOC/Motion电机控制算法以及基于Sitarra产品线的工业以太网解决方案。
当然,在处理方面德州仪器的产品也算是丰富的,它有葱单核到八核的DSP和MCU,可以应对机器人系统中不同等级的运算要求。德州仪器中国区嵌入式处理中国区业务拓展经理庞金鹏拿电机控制举例说,“TI最新的C2000系列产品Soprano采用了三角函数单元。Park 变化广泛应用于电机控制系统中,主要是决定在动态交变荷载作用下是否给固定片提供电压以最大化扭矩,而TMU可以大幅度提高Park Transform的运算速度。在现行的32位浮点MCU处理器中,完成Park变化普遍需要80~100+周期,而利用TMU可以在13个周期就完成Park变化。”
在电机控制方面,除了德州仪器,ADI的电机控制方案也非常适合工业机器人的应用。ADI 的伺服控制方案非常完整,它包括处理器,安全隔离相关的派生产品,位置检测,以及模拟信号处理等,甚至延伸到软件算法。
在伺服控制中,高精度电流和电压检测可提高速度和扭矩控制性能,要求12位及以上的性能的多通道ADC。ADI亚太区电机与电源控制行业市场部专员于常涛表示,ADI的ADC产品可以很好地满足高精度控制的要求。
另外,位置检测性能是伺服控制的关键,光学编码器和旋转变压器常常被用来作为位置传感器,而且旋转变压器会越来越多地被使用。
伺服控制技术从模拟向数字的转换推动了现代伺服系统的发展,也满足了对于电机控制的性能和效率的高要求。从考虑安全和保护的角度,信号采样和功率器件驱动应采用隔离技术,ADI公司的iCoupler数字隔离器产品可满足高压安全隔离要求。在工业应用的设计中,IC产品需要更长的生命周期和更高的可靠性。普通的交流感应电机向永磁同步电机转变已是大势所趋,要求系统设计师能提供更高效率和更灵活的算法。
据于常涛介绍,ADI可以提供门类齐全的产品组合,包括模数/数模转换器、放大器、嵌入式处理器、iCoupler数字隔离器和电源管理器件;这些高性能的器件和增加系统集成度有助于实现更新型的拓扑结构设计,为客户实现系统的差异化设计带来价值,伺服驱动系统的性能同用户最终所构建的运动控制系统的性能和所能提供的精度密切相关。
工业机器人面临的技术挑战
虽然机器人技术在近几年取得了非常大的进步,但还有许多挑战存在,有不少难点需要克服,比如系统复杂度、算法、功能安全和成本等等问题。
目前的工业机器人大都是3~6轴,最高的为7轴,未来为了更多的灵活性,可能会引进更多自由度。江允贵表示,每一个自由度的增加,对算法和运算都是一次大的挑战。随着工业机器人越来越多地在生产线上应用,而现在很多生产线都是工业机器人与人一起同坐的,因此,他认为在机器人的设计过程中,如何保护操作工人的安全也是一个不小的挑战。
在于常涛看来,“智能”是一个相对的概念,在工业机器人智能化的过程当中遇到的技术障碍没办法简单描述,但他个人认为在系统设计、软件算法、技术创新,以及对新技术的敏感度和接受度方面还有很大的提升空间。他觉得半导体厂商与工业机器人厂商之间的紧密配合,深层次合作,是一种比较好的技术提升方式。
庞金鹏则介绍了德州仪器正在尝试冲可扩展和实时性能、智能传感和FieldBus引擎等方面去克服工业机器人在系统整合、效率、成本和精密性能等方面面临的挑战。
居高不下的成本是阻碍企业大规模采用工业其人的关键因素之一,和对于如何降低成本的问题,不同人有不同的看法。江允贵表示,虽然工业机器人的用途很广,种类很多,但对硬件平台来讲,其实是可以共用的。“比如我设计一个7轴的控制平台,那么我也可以用这个平台去生产3轴、4轴、5轴的工业机器人,只是有些硬件没有用到而已,但是由于是平台化的产品,量比较大,价格自然也可以控制下来。”因此,他觉得模块化,平台化的产品更有益于产品的开发和推广,也有利于产品成本的降低。
工业机器人还在不断地向前发展着,相信随着技术的进步,随着“奇点”的来临,机器人的智能化会更加明显。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
































 关注我们
关注我们

