






激光打标机由激光电源、激光器、两座标工作台及数控系统四部分组成。数控系统根据用户输入的程序及打标工艺参数,控制工作台作相应的移动。在走到某一字符或图案点处便发出激光打标机命令,激光器接收到该命令后发射出脉冲激光,激光束通过光学反射镜组聚焦在被加工物表面。在强功率激光作用 下,使物体表面熔融或蒸发而形成痕迹。这些点阵组合起来就是要刻划的字或图案。原理图如图1所示。根据工作台的移动方式,
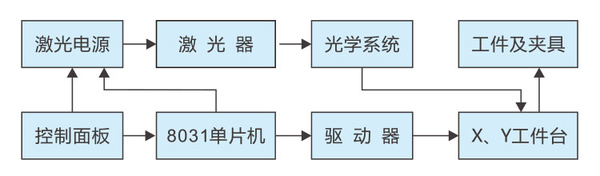
图1 激光打标机原理图
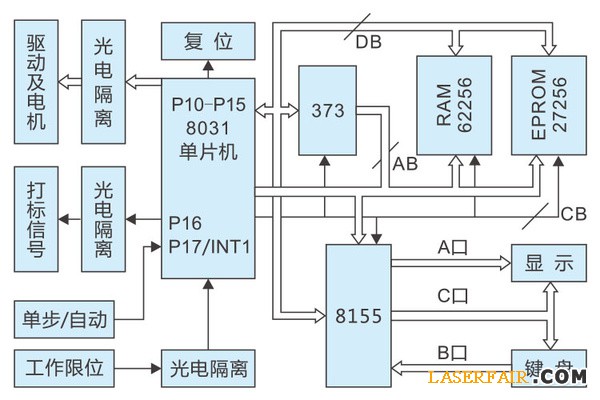
图2 数控系统硬件构图

图3 系统软件
激光打标机可分为三类:
1、扫描式打标;
2、笔顺式打标;
3、路径优化式打标。

图1 激光打标机原理图
系统的软硬件设计
激光打标机数控系统的控制器选用8031 单片微机。硬件框图如图2所示。

图2 数控系统硬件构图
系统软件包括用户图标编辑、用户自定义图案库生成、打标计算及控制、图标程序管理、工件计数、程序校验等,如图3所示。本文对如何用单片机语言编写系统软件不做赘述,主要对前三种功能的实现方法进行讨论。

图3 系统软件
图标程序编辑
由于本系统采用单片机控制,数码管显示,所以图标程序采用格式化提示性输入。一个图标程序由若干字段组成,每个字段又由该字符(或图案)的所有打标信息组成。例如要打标“1998”,字符1、9、9、8组成了该程序的各个字段。一个字段包括6个信息元素:(1)字符标识符,(2)字符类型,(3)X坐标,(4)Y坐标,(5)点间距,(6)重打次数。采用该结构并按提示方式编辑图标程序,易输入、修改,不易出错。
自定义图案
用户需要打标特殊文字或图案时,由于内部字库无法提供,所以采用自定义图案方式生成自己的图案库,每个自定义图案包括三部分信息:(1)字符类型,(2)字符标识符,(3)点阵代码。点阵代码的输入按图案点阵从左到右、从上到下顺序进行,每次输入一个字节的点阵。图案较大时,可以分块定义。
打标控制
根据图表程序按字符标识符和字符类型调入字符点阵,并构成字符位图,由位图经过路径优化转化成工作台的到达指定位置并输出打标信号,完成一点打标。其中路径优化是打标控制需要解决的关键问题。
众所周知,路径优化是一世界性难题,目前尚无最优解,最邻近算法是最广泛采用的方法,编程简单、容易理解,可靠性也较高,可以获得良好的结果。由于该算法近似精度为a≤1/2(InN+1),算法计算复杂性为0(nXn),所以这种方法有时也可能很差,达不到优化目的,在数据点较多时,具有较高的计算发杂性。作者以最邻近算法为基础并依据点阵位图,将其演化成本文的算法。该算法的步骤如下:
①、位图中找出第一个点(I,J),并转换成位移量,同时将该店在点阵位图中设置为零。
②、在(I,J)的相邻点(I+i,J)、(I-i,J)、(I,J+j) 、(I,J-j) 、(I+i,J+j)、(I-i,J, J+j)、(I-i,J-j)、(I+i,J-j)按顺序找出下一个打标点(I’,J’)(i和j的取值为1、2、3…,受点阵位图边界控制)。将(I’,J’)转换成位移量,同时将该店在点阵位图中置为零。
③、判断点阵位图中是否还有为1的位,仍有为1的位时,则以(I’,J’)为新的起点,返回步骤②,否则优化完成。在步骤②中,由于图案点阵是按字节从左到右、从上到下顺序排列,所以该算法可以最快找到最邻近点,无须遍历所有点。因此大大提高了优化速度,这在本文打标的实时控制中尤其重要。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

