






中科院上海光机所陈卫标研究员课题组开展了基于高速伪随机码调制和单光子计数的激光三维成像雷达技术的研究。这一技术兼顾了低峰值功率和高成像速度两方面,因而可以在不损失成像速度的情况下完成系统的低功耗化和小型化。
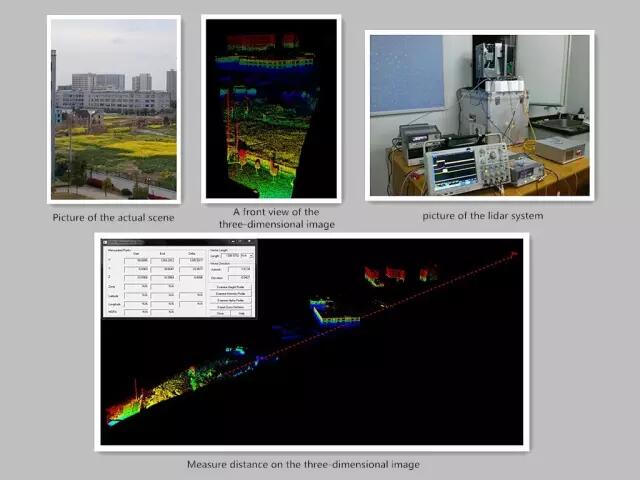

图 课题组部分成员合影
自激光问世以来,激光雷达技术迅速发展,三维成像激光雷达技术更是成为发展的主流。传统的基于直接探测模式的三维成像雷达主要有两种工作方式:
一是采用高峰值功率的单脉冲激光进行飞行时间测距,这种方法需要能产生高峰值功率、窄脉宽脉冲激光的激光器,但是激光器研制成本高,难度大,且无法小型化。
二是采用时间相关单光子计数的方法,这种方法虽然可以在低峰值功率下工作,但需要较长的凝视时间来建立光子随时间的分布函数,因而严重影响成像速度。
为克服上述方法存在的问题,中国科学院上海光学精密机械研究所的陈卫标研究员课题组开展了基于高速伪随机码调制和单光子计数的激光三维成像雷达技术的研究,并完成了室外环境下的验证实验。相关研究成果发表在Chinese Optics Letters 2016年第11期上(Y. F. Zhang, et al., Three-dimensio
nal imaging lidarsystem ba
sed on high speed pseudorandom modulation and photon counting)。

图 基于高速伪随机码调制和单光子计数的三维成像激光雷系统及其成像效果图。(该系统兼顾了低峰值功率发射和高成像速度两方面,并成功获得了1.2km范围内的目标的高分辨率三维图像。)
基于高速伪随机码调制和单光子计数的激光三维成像雷达原理如下:
伪随机码具有尖锐的自相关性和极低的互相关性,因此通过相关运算的方法可以将淹没在噪声中的伪随机编码位置提取出来,通过计算发射脉冲串和收到脉冲串的时间间隔即可获得目标距离,配合扫描系统则可获得三维图像。
这种方法采用低功率编码发射和单光子接收的方式,一方面降低了对激光器峰值功率的要求,另一方面可以通过单次相关运算获得距离值,降低凝视时间。与传统方式相比,这一技术兼顾了低峰值功率和高成像速度两方面,因而可以在不损失成像速度的情况下完成系统的低功耗化和小型化。
该篇论文报道了与系统相距1.2 km的目标的室外成像结果,获得了高质量的三维图像。课题组的陈卫标研究员认为,该技术兼具灵敏度高和成像速率快的优势,特别适合远距离激光三维成像和探测,具有非常好的发展潜力。
后续工作旨在实现系统的小型化、低功耗化以及相应算法的改进,进一步提升在高噪声情况下成像的信噪比。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

























 关注我们
关注我们

