






一年一度的CES展几乎沦为汽车展,而在2017年的CES展中,自动驾驶技术几乎成为了主角。作为自动驾驶的核心环境传感器,激光雷达自然也备受瞩目。

图 1 Quanergy的光学相控阵扫描雷达工作原理示意图
Quanergy公司的Solid State LiDAR S3在CES 2017上获得了汽车智能类(Vehicle Intelligence Category)的最高奖项——最佳创新奖(Best of Innovation Award),则再一次让Quanergy利用固态扫描技术赚足了眼球。而作为车用激光雷达的老大Velodyne也当仁不让,在CES展之前就发布消息,称其与EPC(Efficient Power Co
nversion Corporation)共同研发有望将固态激光雷达成本降至50美金的核心芯片。当然,展会上还有Innoviz和TriLumina也宣称要推出固态激光雷达,但受限于这两家的公开资料太少,暂无法对其技术进行分析。
下面针对Quanergy和Velodyne的公开资料,对其技术进行简单的分析。
一、Quanergy固态扫描技术
图1 是Quanergy在2016年公开的Solid State LiDAR S3工作原理。可以看出S3采用的是光学相控阵技术实现激光扫描,其原理与相控阵雷达一样,通过调节发射阵列中每个发射单元的相位差来改变激光的出射角度。
图 1 Quanergy的光学相控阵扫描雷达工作原理示意图
光学相控阵是怎样通过控制发射阵列中每个发射单元的相位差来改变激光的出射角度呢?
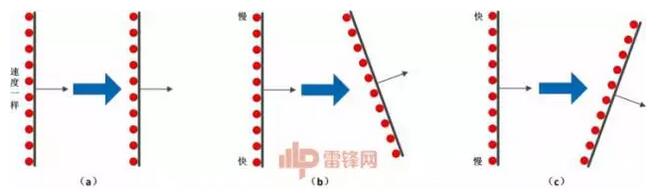
我们可以通过一个简单的比喻来认识光学相控阵是如何工作的(如图 2所示):
假设有10个人在左侧排成一列并排向前走,把他们的连线作为他们整体运动的阵列面,垂直于连线向右的方向为前进方向。
● 如果10个人走路的速度都一样时,则阵列面将平行向前移动,其前进方向不会发生改变,如图 2(a)所示;
● 如果最上方的人走得最慢,其他人的速度从上至下依次逐步增加,最下方的人走得最快,则阵列面不再是平行移动,当经过一段时间后,最下方的人走得路程最远,最上方的人走得路程最短,其阵列面的前进方向将向上方发生明显的角度改变,如图 2(b)所示;
● 如果最上方的人走得最快,其他人的速度从上至下依次逐步减少,最下方的人走得最慢,则经过一段时间后,阵列面的前进方向将向下方发生明显的角度改变,如图 2(c)所示。
图 2 光学相控阵的工作原理距离说明
光学相控阵的工作原理与上面的比喻类似,它的每一个单元都可以对所通过的光(人)的速度进行控制。当一束光被分成许多个小单元(人),每小单元的光束(人)都通过一个光学相控阵单元,并被相控阵单元对其速度进行严格控制。当每个小单元的光束以同样的时间通过光学相控阵后,其速度恢复到进入光学相控阵前的速度,但由于每个小单元的光束所走过的光程(路程)不一样,通过光学相控阵后合成的波阵面(上面比喻中的阵列面)将发生明显变化,从而使得光束的指向发生偏转,这就是光学相控阵的基本工作原理。
上面举的是一维扫描的例子,如果我们把光学相控阵做成向二维阵列(如Quanergy的方案),我们就可以实现二维的扫描。光学相控阵一般都是通过电信号对其相位进行严格的控制实现光束指向扫描,因此也可以称为电子扫描技术。



与传统机械扫描技术相比,光学相控阵扫描技术有三大优势:
● 扫描速度快:光学相控阵的扫描速度取决于所用材料的电子学特性和器件的结构,一般都可以达到MHz量级以上。
● 扫描精度或指向精度高:光学相控阵的扫描精度取决于控制电信号的精度(一般为电压信号),可以做到μrad(千分之一度)量级以上。
● 可控性好:光学相控阵的光束指向完全由电信号控制,在允许的角度范围内可以做到任意指向,可以在感兴趣的目标区域进行高密度的扫描,在其他区域进行稀疏扫描,这对于自动驾驶环境感知非常有用。
但光学相控阵扫描技术也有它的缺点:
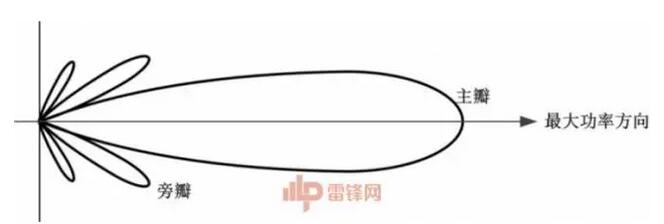
● 易形成旁瓣,影响光束作用距离和角分辨率:光束经过光学相控阵器件后的光束合成实际是光波的相互干涉形成的,干涉效果易形成如下图所示的旁瓣,使得激光能量被分散。
● 加工难度高:光学相控阵要求阵列单元尺寸必须不大于半个波长,一般目前激光雷达的工作波长均在1微米左右,这就意味着阵列单元的尺寸必须不大于500纳米。而且阵列数越多,阵列单元的尺寸越小,能量约往主瓣集中,这就对加工精度要求更高。
图 3 旁瓣示意图
考虑到Quanergy公司的CEO兼联合创始人Louay Eldada的技术背景和Quanergy对外发布的S3工作原理,如图1所示,Quanergy应该是采用了光通信中成熟的平面光波导技术制作光学相控阵扫描器件。为了获得良好的相干合成效果,要求波导结构的尺寸非常微小,仅有几百纳米量级,可以承受通过的激光功率有限。这与水管越小,可容纳的水流量越小一个道理。如果采用脉冲测距体制,将导致信噪比不足,探测距离有限,必须采用其他手段来弥补,譬如多脉冲、脉冲编码或连续波调制等来提高信噪比。
另外,我们常说激光雷达的抗干扰能力强,那是因为传统机械扫描的激光雷达接收视场特别小,外界的直接照射干扰信号很难对准并进入激光雷达的接收视场。而且,激光雷达能接收到的背景光噪声功率是与接收视场成正比的,视场越大,背景光噪声功率越高。Quanergy的光学相控阵扫描仅能对发射激光束指向进行控制,不能实现接收光路进行同步扫描,这就要求S3激光雷达必须采用一个大视场的接收光学系统来接收激光的回波信号。如果扫描角度范围为±60o,那么接收视场的角度也必须达到±60o,这会造成信噪比的下降,而且容易受到其他同类系统发射的激光信号和太阳直射的干扰。
二、Velodyne的固态混合扫描
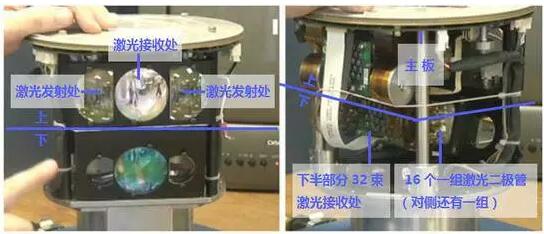
虽然Velodyne从VLP-16产品面世后才开始宣称这款16先激光雷达采用“固态混合”(Solid-State Hybrid Ultra Puck Auto)技术,但实际上Velodyne从其第一款64线激光雷达HDL-64开始,采用的就是固态混合技术。图 4~图 6给出了Velodyne的HDL-64E、HDL-32E和VLP-16三款产品的内部结构照片,可以看出这三款产品除了HDL-64E的差异较大外,HDL-32E和VLP-16基本一样,只不过VLP-16是在HDL-32E的基础上减少了16线,并对结构进行了优化。但实际上HDL-64E和HDL-32E、VLP-16采用的都是同一种技术。
图 4 HDL-64E激光雷达内部照片
图 5 HDL-32E激光雷达内部照片
图 6 VLP-16 激光雷达内部照片
Velodyne所有的产品在俯仰方向(垂直于水平面方向)均采用了电子扫描技术,在方位方向(水平方向)采用机械360o旋转扫描。
图 7给出了一个类似于VLP-16的固态混合激光雷达结构原理示意图。
图 7 固态混合多线激光雷达内部结构原理示意图
该雷达前端有一个发射光学系统和一个接收光学系统,在发射光学系统后端有N组发射模块,而在接收光学后端有N组与发射模块一一对应的接收模块(图中背面遮挡不可见)。当激光雷达开始工作时,N组发射模块和N组接收模块在电路的控制下按照一定的时间顺序轮流工作,例如,在时刻1,发射模块1工作,发射激光脉冲,同时接收模块1接收目标反射的发射模块1发射的激光信号;在时刻2,发射模块2工作,发射激光脉冲,同时接收模块2接收目标反射的发射模块2发射的激光信号;……在时刻N,发射模块N工作,发射激光脉冲,同时接收模块N接收目标反射的发射模块N发射的激光信号。这样在俯仰方向就可以形成非机械式的光学扫描,其扫描角度间隔由两个相邻模块之间的间隔和光学系统的焦距来确定。Velodyne的所有产品在俯仰方向均采用这种“固态扫描”技术进行扫描,在方位方向通过机械扫描实现360o旋转扫描,这就是Velodyne的“固态混合扫描”。
Velodyne的这种固态扫描技术具有以下优点:
● 扫描速度快:扫描速度只决于发射模块的电子学响应速度,不受材料的特性影响,可以实现比光学相控阵更高的扫描频率。但其扫描角度一定设计好后就完全固定,不能通过电控进行改变。
● 接收视场小:这种扫描技术是一种发射和接收同步扫描技术,接收视场小,抗光干扰能力强,信噪比高。
● 可承受高的激光功率:这种扫描技术完全是在自由空间中进行,可以采用高峰值功率的激光脉冲进行高信噪比的探测。
同时,这种扫描技术也存在以下问题:
● 实现二维扫描比较困难:按照目前这种非集成式的模块化设计难以实现二维扫描,必须通过机械或其他方式实现另一维的扫描。集成化是这种技术发展的必然趋势,也是实现二维扫描的关键。
● 扫描角度固定:但其扫描角度一定设计好后就完全固定,不能通过电控进行改变。
● 装调工作量大:需要将发射和接收模块进行精密光学对准装配,工作繁复,工作量大,大批量生产难度大。
三、总结
通过上述的分析可以看出,Quanergy的光学相控阵扫描技术和Velodyne的固态混合扫描技术各有优缺点。Velodyne的产品多年来已经得到实际的验证和使用,其用户遍及了汽车主机厂、自动驾驶研究机构和三维测绘等领域,目前是大家公认的市场老大。但因受到繁复的精密光学装调工作量的影响,目前Velodyne的产能严重受限,远远跟不上市场的需求。集成化是Velodyne解决装调和成本问题的必然之路。可以看到,Velodyne已经开始向集成化的道路迈进,一旦实现高度集成后,其产能将不再受到制约,其成本也会大幅度降低。
Quanergy的光学相控阵技术代表的是一种新技术,但新技术就意味着技术不完善。如果Quanery无法解决旁瓣、信噪比和光干扰等问题,实现远距离成像,那Quanergy的市场前景堪忧。一旦技术突破后,Quanergy必然能在市场上占据重要的位置。Quanergy在今年的CES展上透露,一季度可以向合作伙伴提供量产的S3产品,四季度可以提供给其他客户,这对用户来说是个利好消息。
至于市场对这两家产品的具体反应,我们拭目以待!
本文作者朱少岚,中国科学院大学博士,中国科学院精密机械研究所研究员,宁波傲视智绘光电科技有限公司创始人、董事长。2001 年进入中国科学院西安光学精密机械研究所工作,主要从事激光雷达及相关技术研究,为西安光机所激光雷达技术学科带头人,先后承担多项激光雷达相关的国家重大专项项目研究。在国内外 SCI、EI 等期刊上发表论文近三十余篇;申请专利近二十余项,获授权发明专利十项。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

